|

加州大学戴维斯分校的机器人研究人员开发了一个合作机器人平台的原型,该平台利用计算机视觉,在采摘者沿着二维树冠移动时,自动上下移动到最高效的采摘高度(照片:加利福尼亚大学戴维斯分校Stavros Vougioukas拍摄)。
在果树产业中,工人辅助平台已经很普遍。同时,采收机器人隐约可见,但与实现广泛应用仍然存在昂贵的距离。加州大学戴维斯分校农业工程副教授Stavros Vougioukas指出,种植者可以在二者之间获得益处。
Vougioukas及其由工程师和计算机科学家组成的团队开发了一种“协同机器人”平台的原型,该平台可即时自动调整行走速度和平台高度,以将采摘工人于最有利的采摘位置。
Vougioukas说:“我认为自动的收获辅助设备是更容易实现的一步。”
协作机器人(co-robot或cobot)是协作机器人(collaborative robot)的技术简写,这是一种自动化技术,可以帮助人类在同一空间工作,而不是取代他们。在这个相对较新的领域,程序员“训练”机器人与人一起工作,并适应人的所有细微差别、情绪波动或疲劳程度。
Vougioukas说:“协作机器人确实需要根据人类的行为进行编程,而我们现在才刚刚开始做些表面的工作。”以他的平台为例,一台计算机测量工人的采摘速度和哪里挂的苹果最多,并相应地调整平台高度和行进速度,找到最高效的作业位置和速度。
另一个相反的例子——独立机器人——可以想象一个包装车间的机器人码垛机。放开它,它就会尽可能快地移动,根据自己的效率做出决定,而不是根据周围人的效率。它为人们工作,而不是与人合作。
方法、测试、结果、反应
为了构建协同机器人平台技术,Vougioukas将由George Kantor领导的卡内基·梅隆大学机器人团队开发的计算机视觉系统安装到配备了两个液压作业甲板的Bandit Xpress平台上。Vougioukas说,商业采摘平台通常有四个作业甲板,每侧两个,但研究预算有限。博士生Zhenghao Fei设计了计算机软件和电子产品,加州大学戴维斯分校工程师丹Dennis Sadowski设计了液压系统。
计算机系统会生成一个果实密度图,然后根据工人的身高和采摘速度上下移动甲板,以将其置于最高效的位置。工程师们通过给采摘者配备装有设备的采摘袋(在商业采摘袋中加了电子秤),使计算机能够记录采摘者的进度。
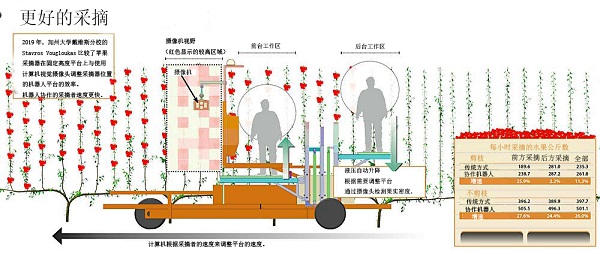
这张图表显示了加州大学戴维斯分校的一项研究结果,该研究比较了在固定高度平台上和自动调整位置高度的机器人平台上的采摘效率。(来源:Stavros Vougioukas /加州大学戴维斯分校,图片:Jared Johnson and Ross Courtney / Good Fruit Grower)
Vougioukas在加利福尼亚Lodi附近的一块V字型富士果园对其进行了两年的测试。他的第二年统计数据表明,自动平台在同时剪枝的情况下将采摘效率提高了11%,在不剪枝的情况下提高了26%。
Vougioukas不知道为什么修剪会有这么大的不同,尽管有可能是其中一个采摘者歪曲了结果,因为他只是碰巧修剪得很慢。
Vougioukas的试验于2019年结束,由美国农业部国家食品和农业研究所推动的国家机器人计划提供的为期四年的120万美元经费资助。如果能得到进一步的资金支持,他愿意在未来继续试验,以测试安全性和效率。
Bandit Xpress的制造商——华盛顿摩Moses Lake的自动化Ag系统公司帮助Vougioukas的团队用液压甲板改装了采摘平台,该公司的老板JJ Dagorret称这项研发“疯狂的棒极了”,它将节省采摘工人的时间、精力和身体负担。他说:“这就像是弯腰从地面捡起东西与从厨房台子上捡起东西的区别一样。”
当前商业版的Bandit Xpress在储果箱前后各有一个采摘甲板,后甲板由液压控制,以便更换装满的储果箱。前甲板下的液压装置是可选的,但大多数种植者都将两个甲板保持在固定的高度。用UC-Davis协作机器人来自动调整甲板的高度,可以最大限度地提高采摘工人的实时工作效率,而无需再让他们操心其他的事。Dagorret说:“工人的重点是摘水果,他们不想搞砸了。”
为Vougioukas的试验提供测试果园的园主Jeff Colombini对这一平台持开放态度,但他希望看到更多的商业结果,然后再认可它。
Colombini目前使用9个Bandit Xpress平台,他的工作人员在采摘季节开始时用铲车来设置前甲板的高度。根据需要,他们手动控制后支杆的液压系统。
Vougioukas的团队还询问了采摘者对这个系统的看法。他们表示,他们很欣赏这种可以调节高度的装置,这样就可以避免过度伸展或弯曲身体。“他们真的很喜欢。” Vougioukas说。
(吴迪 译,胡同乐 校)
|